
Carnegie Mellon University
I am an M.S. student in the Machine Learning Department at Carnegie Mellon University, expected to graduate in December 2026. My research focuses on multimodal agents that interact with complex environments, including Vision-Language-Action models, web agents, and clinical multimodal AI systems. I am particularly interested in building models that go beyond recognizing static inputs, grounding perception, language, memory, and feedback in settings where actions have real consequences.
I am currently advised by Prof. Chenyan Xiong in the CX Research Group. Before CMU, I received my B.S. in Computer Science and Mathematics from New York University, where I was fortunate to be advised by Prof. Lerrel Pinto in the General-purpose Robotics and AI Lab (GRAIL) and by Prof. Yiqiu (Artie) Shen.
Education
-
Carnegie Mellon UniversityAug. 2025 - Dec. 2026Machine Learning DepartmentM.S. in Machine Learning
-
New York UniversityAug. 2021 - May 2025Tandon School of EngineeringB.S. in Computer Science & Mathematics
Experience
-
TikTokMay 2026 - Aug. 2026TikTok Shop Ads RankingMachine Learning Engineer Intern
-
DTCCJun. 2025 - Aug. 2025Technology Research & InnovationIT Intern
-
TeragoniaFeb. 2025 - May 2025Data Science & Artificial IntelligenceAI/ML Engineer Intern
-
Coleman ResearchJun. 2024 - Aug. 2024Machine Learning & Generative AIIT Intern
Honors & Awards
-
Best Paper AwardCoRL Workshop on Lifelong Learning for Home Robot2024
-
Honorable MentionMathematical Contest in Modeling2022
Selected Publications (view all )
EmbodiedMidtrain: Bridging the Gap between Vision-Language Models and Vision-Language-Action Models via Mid-training
Yiyang Du, Zhanqiu Guo, Xin Ye, Liu Ren, Chenyan Xiong
arXiv preprint 2026
A mid-training framework that selects VLA-aligned data from broader VLM corpora to improve downstream vision-language-action policy learning.
EmbodiedMidtrain: Bridging the Gap between Vision-Language Models and Vision-Language-Action Models via Mid-training
Yiyang Du, Zhanqiu Guo, Xin Ye, Liu Ren, Chenyan Xiong
arXiv preprint 2026
A mid-training framework that selects VLA-aligned data from broader VLM corpora to improve downstream vision-language-action policy learning.
Modeling Distinct Human Interaction in Web Agents
Faria Huq, Zora Zhiruo Wang, Zhanqiu Guo, Venu Arvind Arangarajan, Tianyue Ou, Frank Xu, Shuyan Zhou, Graham Neubig, Jeffrey P. Bigham
arXiv preprint 2026
Introduces CowCorpus, a dataset of real-user web navigation trajectories with interleaved human and agent actions, and trains intervention-aware web agents.
Modeling Distinct Human Interaction in Web Agents
Faria Huq, Zora Zhiruo Wang, Zhanqiu Guo, Venu Arvind Arangarajan, Tianyue Ou, Frank Xu, Shuyan Zhou, Graham Neubig, Jeffrey P. Bigham
arXiv preprint 2026
Introduces CowCorpus, a dataset of real-user web navigation trajectories with interleaved human and agent actions, and trains intervention-aware web agents.
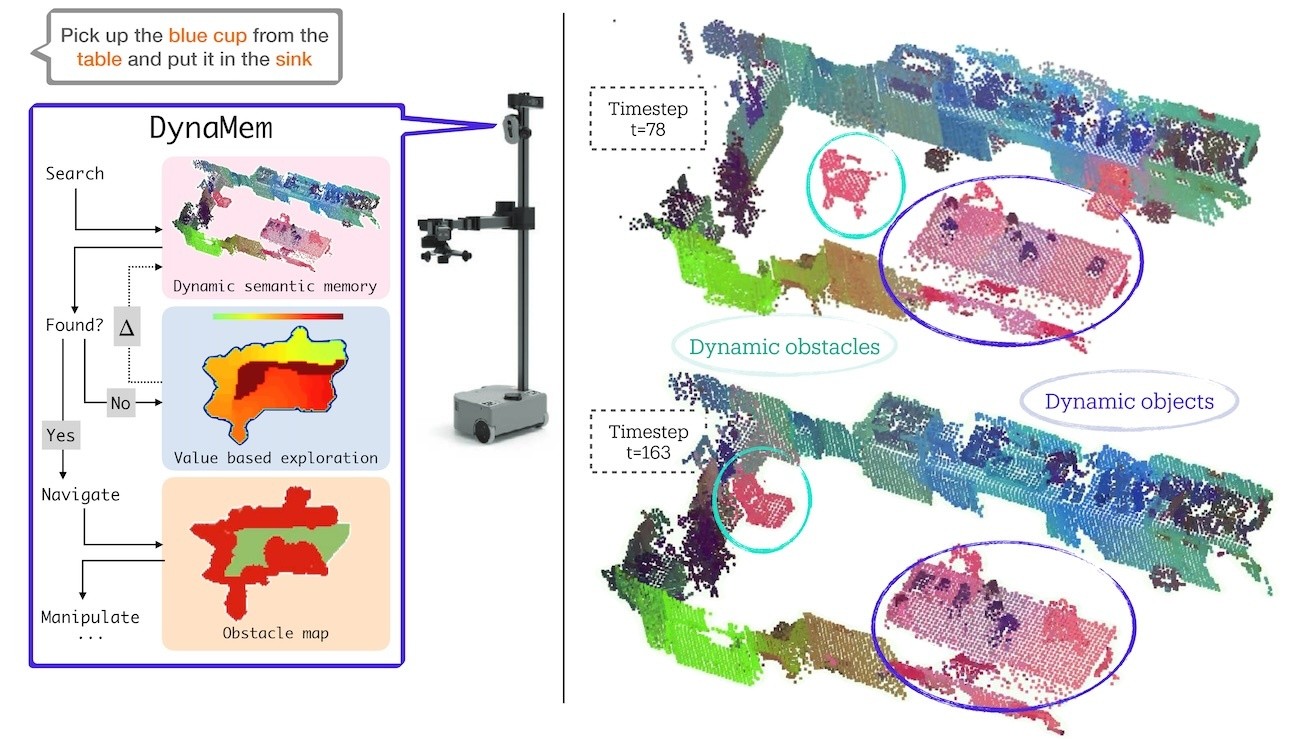
DynaMem: Online Dynamic Spatio-Semantic Memory for Open World Mobile Manipulation
Peiqi Liu, Zhanqiu Guo, Mohit Warke, Soumith Chintala, Chris Paxton, Nur Muhammad Mahi Shafiullah, Lerrel Pinto
IEEE International Conference on Robotics and Automation (ICRA) 2025 pp. 13346-13355
An online dynamic spatio-semantic memory system for open-world mobile manipulation, enabling robots to search for, localize, and recover objects in changing environments.
DynaMem: Online Dynamic Spatio-Semantic Memory for Open World Mobile Manipulation
Peiqi Liu, Zhanqiu Guo, Mohit Warke, Soumith Chintala, Chris Paxton, Nur Muhammad Mahi Shafiullah, Lerrel Pinto
IEEE International Conference on Robotics and Automation (ICRA) 2025 pp. 13346-13355
An online dynamic spatio-semantic memory system for open-world mobile manipulation, enabling robots to search for, localize, and recover objects in changing environments.
ContextWIN: Whittle Index Based Mixture-of-Experts Neural Model For Restless Bandits Via Deep RL
arXiv preprint 2024
A context-aware mixture-of-experts extension of Neural Whittle Index Networks for restless multi-armed bandits, with convergence analysis and applications to dynamic decision making.
ContextWIN: Whittle Index Based Mixture-of-Experts Neural Model For Restless Bandits Via Deep RL
arXiv preprint 2024
A context-aware mixture-of-experts extension of Neural Whittle Index Networks for restless multi-armed bandits, with convergence analysis and applications to dynamic decision making.